




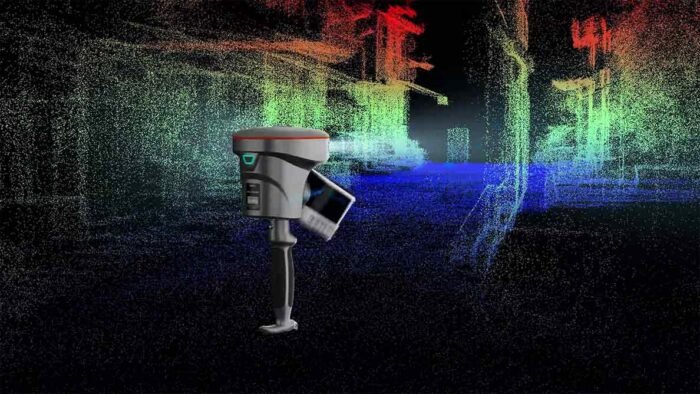







CHCNAV RS10 LiDAR + SLAM RTK skeneris
CHCNAV RS10 – profesionalus rankinis SLAM 3D LiDAR skeneris su integruotu GNSS RTK.
Sukurtas greitam ir tiksliam skenavimui lauke ir pastatuose. RS10 užtikrina iki 5 cm absoliutų ir 1 cm reliatyvų tikslumą, turi 16 arba 32 linijų LiDAR, trigubas kameras (15 MP), SFix SLAM technologiją darbui be palydovų, ir 1408 kanalų GNSS RTK modulį. Lengvas, mobilus ir puikiai tinkantis gatvių, pastatų, tunelių, sandėlių ir inžinerinių tinklų 3D skenavimui Lietuvos sąlygomis.
Aprašymas
CHCNAV RS10 – rankinis SLAM lazerinis skeneris su integruotu GNSS RTK, sukurtas greitam ir tiksliam 3D aplinkos skenavimui tiek lauke, tiek patalpose. Integruota RTK imtuvo, IMU, kamerų ir LiDAR kombinacija leidžia pasiekti iki 5 cm absoliutų ir 1 cm reliatyvų tikslumą, o duomenys apdorojami realiuoju laiku – be sudėtingo post–procesingo.
Rankinis SLAM skeneris ir GNSS RTK viename korpuse
CHCNAV RS10 sujungia GNSS RTK imtuvą, 3D LiDAR skenerį, IMU ir panoramines kameras į vieną kompaktišką įrenginį. Tai leidžia:
-
skenuoti lauke su RTK (gatvės, kvartalai, karjerai, infrastruktūra);
-
dirbti be GNSS signalo pastatuose, požeminėse perėjose, tuneliuose ar tankiuose miškuose naudojant SLAM.
Įrenginys sveria apie 1,8 kg (su RTK moduliu ir baterija), turi karštai keičiamas baterijas, todėl patogus ilgam darbui lauke.
Tikslumas ir našumas Lietuvos sąlygoms
-
Absoliutus tikslumas – iki 5 cm (RS10 16 linijų versija) ir iki 2 cm (RS10 32 linijų versija).
-
Reliatyvus tikslumas – apie 1 cm, taškų debesies sluoksnio storis nuo 1–2 cm, todėl puikiai tinka detalizuotam pastatų, kelių ir inžinerinių tinklų modeliavimui.
-
Integruotas 1408 kanalų GNSS imtuvas palaiko GPS, GLONASS, Galileo, BeiDou, QZSS ir NavIC, užtikrinant stabilų RTK darbą miestuose ir atvirose vietovėse.
GNSS tikslumai (su LandStar ir tinklinėmis korekcijomis, pvz., LitPOS):
- RTK: H: 8 mm + 1 ppm, V: 15 mm + 1 ppm
-
PPK: H: 3 mm + 1 ppm, V: 5 mm + 1 ppm
Realiojo laiko SLAM apdorojimas – be privalomo post-procesingo
RS10 turi integruotą 1,2 Tflops skaičiavimo galią, todėl:
-
SLAM trajektorija skaičiuojama realiu laiku,
-
taškų debesį galima matyti planšetėje / telefone dar skenavimo metu,
-
mažesniems objektams daugeliu atvejų pakanka iš karto nusikopijuoti rezultatą iš RS10 – be papildomo apdorojimo.
Sudėtingiems projektams galima atlikti antrinį patikslinimą (secondary refinement) su CoPre programine įranga: trajektorijos optimizavimas, tikslumo pagerinimas, kelių skenavimų sujungimas.
ipinės taikymo sritys Lietuvoje
-
Gatvių ir kvartalų 3D skenavimas
-
Įvairių statinių, sandėlių, tunelių, garažų skenavimas (statinių kadastriniai matavimai)
-
Pastatų fasadų ir konstrukcijų 3D modeliai (BIM)
-
Karjerų, sankaupų, sandėliuojamų medžiagų tūrio skaičiavimas
-
Energetikos ir inžinerinių tinklų 3D inventorizacija
-
Miškų ir želdinių, parkų, infrastruktūros objektų apskaita
RS10 ypač patrauklus geodezininkams, matininkams, inžinerinėms ir statybos įmonėms, kurios nori į savo darbo procesus įsivesti greitą SLAM skenavimą ir sutaupyti laiką lauke lyginant su klasikiniai matavimais naudojant gnss įranga
Bendra informacija
| Parametras | Reikšmė |
|---|---|
| Prietaiso tipas | Rankinis SLAM 3D LiDAR skeneris su integruotu GNSS RTK |
| Absoliutus tikslumas | iki 5 cm (16 linijų) / iki 2 cm (32 linijų) |
| Reliatyvus tikslumas | iki 1 cm |
| Taško debesies sluoksnio storis | 1–2 cm |
| Darbo laikas nuo vienos baterijos | ~1 val. (galimos papildomos baterijos, karštas keitimas) |
| Duomenų saugykla | 512 GB vidinė atmintis |
| Matymo kampas (FOV) | 360° × 270° |
| Svoris | ≈1,7–1,9 kg su RTK ir baterija |
| Apsaugos klasė | IP64, atsparus dulkėms ir vandens purslams |
| Darbinė temperatūra | -20 °C … +50 °C |
LiDAR skeneris
| Parametras | RS10 16 linijų | RS10 32 linijų |
|---|---|---|
| Matavimo nuotolis | 0,05–120 m | 0,5–300 m |
| Kanalu (linijų) skaičius | 16 | 32 |
| Maks. taškų skaičius | iki 320 000 t/s | iki 640 000 t/s |
| Maks. grįžtančių impulsų skaičius | 2 | 3 |
| FOV horizontalus | 360° | 360° |
| FOV vertikalus | 30° (±15°) | 40,3° (~-20,8°…+19,5°) |
| Lazerio ilgis | 905 nm, 1 klasė (eye safe) | |
| Nuotolis @10 % atspindžio | iki 80 m | iki 80 m |
GNSS ir IMU
| Parametras | Reikšmė |
|---|---|
| GNSS kanalų skaičius | 1408 |
| Palydovų sistemos | GPS, GLONASS, Galileo, BeiDou, QZSS, NavIC, SBAS (EGNOS) |
| RTK tikslumas | H: 8 mm + 1 ppm; V: 15 mm + 1 ppm |
| PPK tikslumas | H: 3 mm + 1 ppm; V: 5 mm + 1 ppm |
| Kodinis diferencialinis | H: 0,4 m RMS; V: 0,8 m RMS |
| IMU atnaujinimo dažnis | 200 Hz, auto inicializacija |
| Padėties po post–procesingo tikslumas | 0,010 m horiz., 0,020 m vert. |
| Posvyrio/azimuto tikslumas | 0,005° pitch/roll; 0,010° heading |
Kamera
| Parametras | Reikšmė |
|---|---|
| Kamerų skaičius | 3 vnt. |
| Bendra raiška | 15 MP (3 × 5 MP) |
| Kadro dydis | 2592 × 1944 px |
| Matymo kampas | 210° × 170° |
Pastaba: konkrečios reikšmės gali nežymiai skirtis pagal komplektaciją ir gamintojo atnaujinimus.
- Ar RS10 galima naudoti patalpose ir požeminėse erdvėse, kur nėra GNSS signalo?
Taip. Būtent tam skirtas SLAM režimas – prietaisas naudoja LiDAR ir IMU informaciją, o trajektorija skaičiuojama realiuoju laiku. GNSS nereikalingas, todėl galima skenuoti pastatus, garažus, požemines perėjas, sandėlius ir pan.
- Kuo RS10 skiriasi nuo įprastų kuprinių ar automobilinių LiDAR sistemų?
RS10 yra rankinis, lengvas ir mobilus. Jis nereikalauja specialios platformos ar transporto priemonės, todėl tinka darbui tankiuose miesto kvartaluose, kiemuose, pastato viduje ar sudėtingoje aplinkoje.
Susiję produktai







Įvertinimas ir apžvalga
Kol kas nėra atsiliepimų.